-
1 синяя копия
2) Polygraphy: blue copy, blue-key, blueline print, cyanotype copy3) Advertising: blue print, blueline reproduction4) Makarov: blue-key (служит для монтажа), blueline (позитивная), blueprint (негативная), heliographic print, shop print -
2 spider deck
монтажная площадка (на буровом судне или плавучей полупогружной буровой платформе; служит для монтажа и испытания подводного оборудования перед спуском к подводному устью)Англо-русский словарь промышленной и научной лексики > spider deck
-
3 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
4 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
5 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
6 линия электропередачи
- transmission line
- power transmission line
- power lines
- power line
- electric power transmission line
- electric power line
- electric line
линия электропередачи
Электрическая линия, выходящая за пределы электростанции или подстанции и предназначенная для передачи электрической энергии на расстояние.
[ ГОСТ 19431-84]
линия электропередачи
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
[ ГОСТ 24291-90]
линия электропередачи
Электроустановка для передачи на расстояние электрической энергии, состоящая из проводников тока - проводов, кабелей, а также вспомогательных устройств и конструкций
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
<> линия передачи (в электроэнергетических системах)
-
[IEV number 151-12-31]
линия электропередачи (ЛЭП)
Сооружение, состоящее из проводов и вспомогательных устройств, предназначенное для передачи или распределения электрической энергии.
[БСЭ]EN
electric line
an arrangement of conductors, insulating materials and accessories for transferring electricity between two points of a system
[IEV ref 601-03-03]
transmission line (in electric power systems)
line for transfer of electric energy in bulk
Source: 466-01-13 MOD
[IEV number 151-12-31]FR
ligne électrique
ensemble constitué de conducteurs, d'isolants et d'accessoires destiné au transfert d'énergie électrique d'un point à un autre d'un réseau
[IEV ref 601-03-03]
ligne de transport, f
ligne destinée à un transfert massif d'énergie électrique
Source: 466-01-13 MOD
[IEV number 151-12-31]Параллельные тексты EN-RU
Most transmission lines operate with three-phase alternating current (ac).
Большинство линий электропередачи являются трехфазными и передают энергию на переменном токе.
[Перевод Интент]Линии электропередачи называются совокупность сооружений, служащих для передачи электроэнергии от электростанции до потребителей. К ним относятся электроприемники, понижающие и повышающие электростанции и подстанции, также они являются составом электрической сети.
Линии электропередачи бывают как воздушными, так и кабельными. Для кабельных характерно напряжение до 35кВ, а для воздушных до 750 кВ. В зависимости от того какую мощность передаёт ЛЭП могут быть Межсистемными и Распределительными. Межсистемные соединяющие крупные электрические системы для транспортировки больших потоков мощности на большие расстояния.
Распределительные служат для передачи электроэнергии в самой электрической системе при низких напряжениях. Правилами устройства электроустановок и СНиПами определяются параметры Линий электропередач и её элементы. Значение тока, величину напряжения, количество цепей, из какого материала должны состоять опоры, сечение и конструкция проводов относят к основным характеристикам ЛЭП.
Для переменного тока существуют табличные значения напряжения: 2 кВ., 3 кВ., 6 кВ., 10 кВ., 20 кВ., 35 кВ., 220 кВ., 330 кВ., 500 кВ.,750 кВ.
Воздушные линии электрических сетей (ВЛ) это линии которые находятся на воздухе и используются для транспортировки электроэнергии на большие территории по проводам. Соединительные провода, грозозащитные троса, опоры(железобетонные, металлические), изоляторы(фарфоровые, стеклянные) служат построения воздушных линий.
Классификация воздушных линий-
По роду тока:
- ВЛ переменного тока,
- ВЛ постоянного тока.
В большинстве случаев, ВЛ служат для транспортировки переменного тока лишь иногда в особых случаях применяются линии постоянного тока (например, для питание контактной сети или связи энергосистем). Ёмкостные и индуктивные потери у линии постоянного тока меньше чем у линий переменного тока. Всё же большого распространения такие линии не получили.
-
По назначению
-
Сверхдальние ВЛ
предназначены для соединения отдельных энергосистем номиналом 500 кВ и выше -
Магистральные ВЛ
предназначены для транспортировки энергии от крупных электростанций, и для соединения энергосистем друг с другом, и соединения электростанций внутри энергосистем номиналом 220 и 330 кВ -
Распределительные ВЛ
служат для снабжения предприятий и потребителей крупных районов и для соединения пунктов распределения электроэнергии с потребителями классом напряжения 35, 110 и 150 кВ ВЛ 20 кВ и ниже, передающие энергию к потребителям.
-
Сверхдальние ВЛ
-
По напряжению
- Воздушные Линии до 1к В (ВЛ низкого класса напряжений)
- Воздушные Линии больше 1 кВ
- Воздушные Линии 1–35 кВ (ВЛ среднего класса напряжений)
- Воздушные Линии 110–220 кВ (ВЛ высокого класса напряжений)
- Воздушные Линии 330–750 кВ (ВЛ сверхвысокого класса напряжений)
-
Воздушные Линии больше 750 кВ (ВЛ ультравысокого класса напряжений)
-
По режиму работы нейтралей
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
т.е. нейтраль не присоединена к устройству заземленному или присоединена через прибор с высоким сопротивлением к нему. У нас такой режим нейтрали применяется в электросетях напряжением 3—35 кВ с низкими токами однофазных заземлений. - Трёхфазные сети с резонансно-заземлёнными (компенсированными) нейтральная шина соединена с заземлением через индуктивность. Обычно используется в сетях с высокими токами однофазных заземлений напряжением 3–35 кВ
- Трёхфазные сети с эффективно-заземлёнными нейтралями это сети высокого и сверхвысокого напряжения, нейтрали которых заземлены через маленькое активное сопротивление или напрямую. В таких сетях применяются трансформаторы напряжением 110 или 150 и иногда 220 кВ,
- Сети с глухозаземлённой нейтралью это когда нейтраль трансформатора или генератора заземляется через малое сопротивление или напрямую. Эти сети имеют напряжение менее 1 кВ, или сети 220 кВ и больше.
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
-
По режиму работы в зависимости от состояния сети
- Воздушные Линии нормального режима работы (опоры целы провода, троса не оборваны)
- Воздушные Линии аварийного режима работы (при разрыве проводов и тросов)
- Воздушные Линии монтажного режима работы (во время монтажа или демонтажа опор, проводов и тросов)
Кабельная линия электропередачи (КЛ) — это линия которая служит для транспортировки электроэнергии, в неё входит один или несколько кабелей (проложенных параллельно) которые соединяются соединительными муфтами и заканчиваются при помощи стопорных и концевых муфт (заделками) и деталей для крепления, а для линий использующие масло, кроме того, с подпитывающими приборами и датчиком давления масла.
Кабельные лини можно разделить на 3 класса в зависимости от прокладки кабеля:
- воздушные,
- подземные
- подводные.
кабельные линии протянутые воздушным способом это линии в которых кабель цепляют стальным тросом на опорах, стойках, кронштейнах.
Подземные кабельные линии — кабель прокладываемый в кабельных траншее, тоннелях, коллекторах.
Подводные кабельные линии это линии в которых кабель проходит через водную преграду по её дну.[ Источник]
Тематики
Синонимы
EN
- electric line
- electric power line
- electric power transmission line
- power line
- power transmission line
- transmission line
DE
FR
2 линия электропередачи; ЛЭП
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
601-03-03*
de Leitung
en electric line
fr ligne electrique
Источник: ГОСТ 24291-90: Электрическая часть электростанции и электрической сети. Термины и определения оригинал документа
3.1.13 линия электропередачи (power lines): Распределительная линия коммуникаций, предназначенная для подачи электрической энергии в здание (сооружение) и питания расположенного в нем электрического или электронного оборудования. Линия электропередачи может быть низковольтной и высоковольтной.
Источник: ГОСТ Р МЭК 62305-2-2010: Менеджмент риска. Защита от молнии. Часть 2. Оценка риска оригинал документа
3.25 линия электропередачи (power lines): Распределительная линия коммуникаций, предназначенная для подачи электрической энергии в здание (сооружение) и питания расположенного в нем электрического или электронного оборудования. Линия электропередачи может быть низковольтной и высоковольтной.
Источник: ГОСТ Р МЭК 62305-1-2010: Менеджмент риска. Защита от молнии. Часть 1. Общие принципы оригинал документа
Русско-английский словарь нормативно-технической терминологии > линия электропередачи
7 линия электропередачи
линия электропередачи
Электрическая линия, выходящая за пределы электростанции или подстанции и предназначенная для передачи электрической энергии на расстояние.
[ ГОСТ 19431-84]
линия электропередачи
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
[ ГОСТ 24291-90]
линия электропередачи
Электроустановка для передачи на расстояние электрической энергии, состоящая из проводников тока - проводов, кабелей, а также вспомогательных устройств и конструкций
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
<> линия передачи (в электроэнергетических системах)
-
[IEV number 151-12-31]
линия электропередачи (ЛЭП)
Сооружение, состоящее из проводов и вспомогательных устройств, предназначенное для передачи или распределения электрической энергии.
[БСЭ]EN
electric line
an arrangement of conductors, insulating materials and accessories for transferring electricity between two points of a system
[IEV ref 601-03-03]
transmission line (in electric power systems)
line for transfer of electric energy in bulk
Source: 466-01-13 MOD
[IEV number 151-12-31]FR
ligne électrique
ensemble constitué de conducteurs, d'isolants et d'accessoires destiné au transfert d'énergie électrique d'un point à un autre d'un réseau
[IEV ref 601-03-03]
ligne de transport, f
ligne destinée à un transfert massif d'énergie électrique
Source: 466-01-13 MOD
[IEV number 151-12-31]Параллельные тексты EN-RU
Most transmission lines operate with three-phase alternating current (ac).
Большинство линий электропередачи являются трехфазными и передают энергию на переменном токе.
[Перевод Интент]Линии электропередачи называются совокупность сооружений, служащих для передачи электроэнергии от электростанции до потребителей. К ним относятся электроприемники, понижающие и повышающие электростанции и подстанции, также они являются составом электрической сети.
Линии электропередачи бывают как воздушными, так и кабельными. Для кабельных характерно напряжение до 35кВ, а для воздушных до 750 кВ. В зависимости от того какую мощность передаёт ЛЭП могут быть Межсистемными и Распределительными. Межсистемные соединяющие крупные электрические системы для транспортировки больших потоков мощности на большие расстояния.
Распределительные служат для передачи электроэнергии в самой электрической системе при низких напряжениях. Правилами устройства электроустановок и СНиПами определяются параметры Линий электропередач и её элементы. Значение тока, величину напряжения, количество цепей, из какого материала должны состоять опоры, сечение и конструкция проводов относят к основным характеристикам ЛЭП.
Для переменного тока существуют табличные значения напряжения: 2 кВ., 3 кВ., 6 кВ., 10 кВ., 20 кВ., 35 кВ., 220 кВ., 330 кВ., 500 кВ.,750 кВ.
Воздушные линии электрических сетей (ВЛ) это линии которые находятся на воздухе и используются для транспортировки электроэнергии на большие территории по проводам. Соединительные провода, грозозащитные троса, опоры(железобетонные, металлические), изоляторы(фарфоровые, стеклянные) служат построения воздушных линий.
Классификация воздушных линий-
По роду тока:
- ВЛ переменного тока,
- ВЛ постоянного тока.
В большинстве случаев, ВЛ служат для транспортировки переменного тока лишь иногда в особых случаях применяются линии постоянного тока (например, для питание контактной сети или связи энергосистем). Ёмкостные и индуктивные потери у линии постоянного тока меньше чем у линий переменного тока. Всё же большого распространения такие линии не получили.
-
По назначению
-
Сверхдальние ВЛ
предназначены для соединения отдельных энергосистем номиналом 500 кВ и выше -
Магистральные ВЛ
предназначены для транспортировки энергии от крупных электростанций, и для соединения энергосистем друг с другом, и соединения электростанций внутри энергосистем номиналом 220 и 330 кВ -
Распределительные ВЛ
служат для снабжения предприятий и потребителей крупных районов и для соединения пунктов распределения электроэнергии с потребителями классом напряжения 35, 110 и 150 кВ ВЛ 20 кВ и ниже, передающие энергию к потребителям.
-
Сверхдальние ВЛ
-
По напряжению
- Воздушные Линии до 1к В (ВЛ низкого класса напряжений)
- Воздушные Линии больше 1 кВ
- Воздушные Линии 1–35 кВ (ВЛ среднего класса напряжений)
- Воздушные Линии 110–220 кВ (ВЛ высокого класса напряжений)
- Воздушные Линии 330–750 кВ (ВЛ сверхвысокого класса напряжений)
-
Воздушные Линии больше 750 кВ (ВЛ ультравысокого класса напряжений)
-
По режиму работы нейтралей
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
т.е. нейтраль не присоединена к устройству заземленному или присоединена через прибор с высоким сопротивлением к нему. У нас такой режим нейтрали применяется в электросетях напряжением 3—35 кВ с низкими токами однофазных заземлений. - Трёхфазные сети с резонансно-заземлёнными (компенсированными) нейтральная шина соединена с заземлением через индуктивность. Обычно используется в сетях с высокими токами однофазных заземлений напряжением 3–35 кВ
- Трёхфазные сети с эффективно-заземлёнными нейтралями это сети высокого и сверхвысокого напряжения, нейтрали которых заземлены через маленькое активное сопротивление или напрямую. В таких сетях применяются трансформаторы напряжением 110 или 150 и иногда 220 кВ,
- Сети с глухозаземлённой нейтралью это когда нейтраль трансформатора или генератора заземляется через малое сопротивление или напрямую. Эти сети имеют напряжение менее 1 кВ, или сети 220 кВ и больше.
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
-
По режиму работы в зависимости от состояния сети
- Воздушные Линии нормального режима работы (опоры целы провода, троса не оборваны)
- Воздушные Линии аварийного режима работы (при разрыве проводов и тросов)
- Воздушные Линии монтажного режима работы (во время монтажа или демонтажа опор, проводов и тросов)
Кабельная линия электропередачи (КЛ) — это линия которая служит для транспортировки электроэнергии, в неё входит один или несколько кабелей (проложенных параллельно) которые соединяются соединительными муфтами и заканчиваются при помощи стопорных и концевых муфт (заделками) и деталей для крепления, а для линий использующие масло, кроме того, с подпитывающими приборами и датчиком давления масла.
Кабельные лини можно разделить на 3 класса в зависимости от прокладки кабеля:
- воздушные,
- подземные
- подводные.
кабельные линии протянутые воздушным способом это линии в которых кабель цепляют стальным тросом на опорах, стойках, кронштейнах.
Подземные кабельные линии — кабель прокладываемый в кабельных траншее, тоннелях, коллекторах.
Подводные кабельные линии это линии в которых кабель проходит через водную преграду по её дну.[ Источник]
Тематики
Синонимы
EN
- electric line
- electric power line
- electric power transmission line
- power line
- power transmission line
- transmission line
DE
FR
2 линия электропередачи; ЛЭП
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
601-03-03*
de Leitung
en electric line
fr ligne electrique
Источник: ГОСТ 24291-90: Электрическая часть электростанции и электрической сети. Термины и определения оригинал документа
ЛЭП
D. Elektroenergieübertragungsleitung
Электрическая линия, выходящая за пределы электростанции или подстанции, и предназначенная для передачи электрической энергии на расстояние
Источник: ГОСТ 19431-84: Энергетика и электрификация. Термины и определения оригинал документа
Русско-немецкий словарь нормативно-технической терминологии > линия электропередачи
8 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.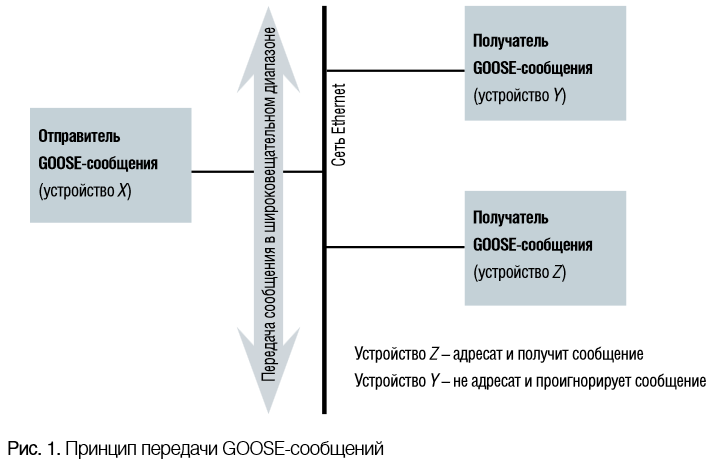
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.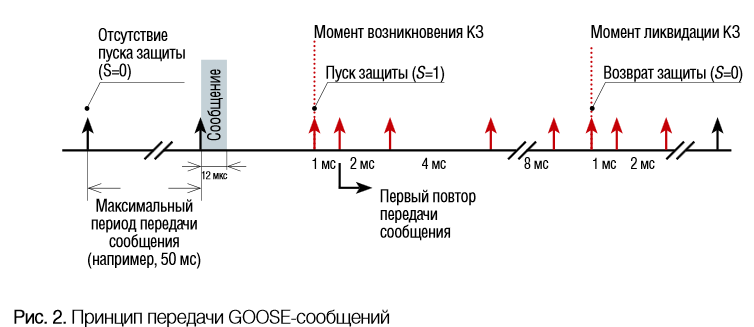
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).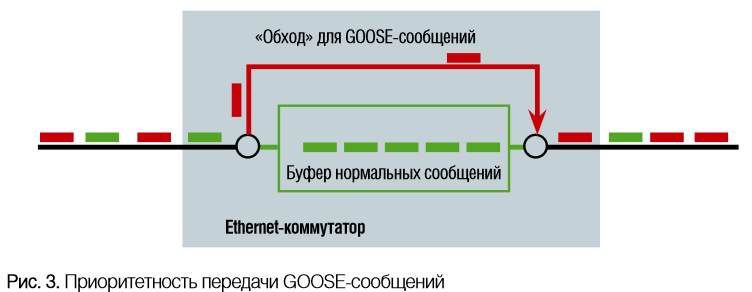
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
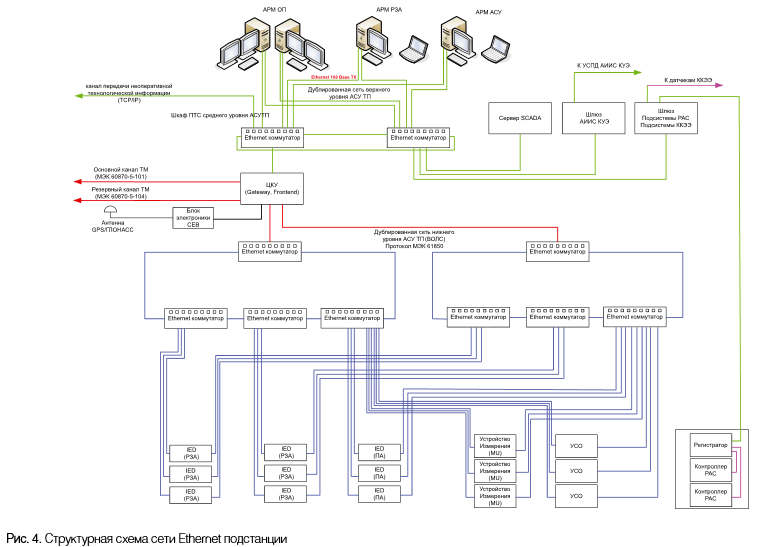
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).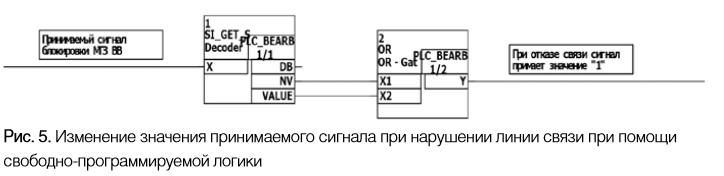
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
9 линия электропередачи
линия электропередачи
Электрическая линия, выходящая за пределы электростанции или подстанции и предназначенная для передачи электрической энергии на расстояние.
[ ГОСТ 19431-84]
линия электропередачи
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
[ ГОСТ 24291-90]
линия электропередачи
Электроустановка для передачи на расстояние электрической энергии, состоящая из проводников тока - проводов, кабелей, а также вспомогательных устройств и конструкций
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
<> линия передачи (в электроэнергетических системах)
-
[IEV number 151-12-31]
линия электропередачи (ЛЭП)
Сооружение, состоящее из проводов и вспомогательных устройств, предназначенное для передачи или распределения электрической энергии.
[БСЭ]EN
electric line
an arrangement of conductors, insulating materials and accessories for transferring electricity between two points of a system
[IEV ref 601-03-03]
transmission line (in electric power systems)
line for transfer of electric energy in bulk
Source: 466-01-13 MOD
[IEV number 151-12-31]FR
ligne électrique
ensemble constitué de conducteurs, d'isolants et d'accessoires destiné au transfert d'énergie électrique d'un point à un autre d'un réseau
[IEV ref 601-03-03]
ligne de transport, f
ligne destinée à un transfert massif d'énergie électrique
Source: 466-01-13 MOD
[IEV number 151-12-31]Параллельные тексты EN-RU
Most transmission lines operate with three-phase alternating current (ac).
Большинство линий электропередачи являются трехфазными и передают энергию на переменном токе.
[Перевод Интент]Линии электропередачи называются совокупность сооружений, служащих для передачи электроэнергии от электростанции до потребителей. К ним относятся электроприемники, понижающие и повышающие электростанции и подстанции, также они являются составом электрической сети.
Линии электропередачи бывают как воздушными, так и кабельными. Для кабельных характерно напряжение до 35кВ, а для воздушных до 750 кВ. В зависимости от того какую мощность передаёт ЛЭП могут быть Межсистемными и Распределительными. Межсистемные соединяющие крупные электрические системы для транспортировки больших потоков мощности на большие расстояния.
Распределительные служат для передачи электроэнергии в самой электрической системе при низких напряжениях. Правилами устройства электроустановок и СНиПами определяются параметры Линий электропередач и её элементы. Значение тока, величину напряжения, количество цепей, из какого материала должны состоять опоры, сечение и конструкция проводов относят к основным характеристикам ЛЭП.
Для переменного тока существуют табличные значения напряжения: 2 кВ., 3 кВ., 6 кВ., 10 кВ., 20 кВ., 35 кВ., 220 кВ., 330 кВ., 500 кВ.,750 кВ.
Воздушные линии электрических сетей (ВЛ) это линии которые находятся на воздухе и используются для транспортировки электроэнергии на большие территории по проводам. Соединительные провода, грозозащитные троса, опоры(железобетонные, металлические), изоляторы(фарфоровые, стеклянные) служат построения воздушных линий.
Классификация воздушных линий-
По роду тока:
- ВЛ переменного тока,
- ВЛ постоянного тока.
В большинстве случаев, ВЛ служат для транспортировки переменного тока лишь иногда в особых случаях применяются линии постоянного тока (например, для питание контактной сети или связи энергосистем). Ёмкостные и индуктивные потери у линии постоянного тока меньше чем у линий переменного тока. Всё же большого распространения такие линии не получили.
-
По назначению
-
Сверхдальние ВЛ
предназначены для соединения отдельных энергосистем номиналом 500 кВ и выше -
Магистральные ВЛ
предназначены для транспортировки энергии от крупных электростанций, и для соединения энергосистем друг с другом, и соединения электростанций внутри энергосистем номиналом 220 и 330 кВ -
Распределительные ВЛ
служат для снабжения предприятий и потребителей крупных районов и для соединения пунктов распределения электроэнергии с потребителями классом напряжения 35, 110 и 150 кВ ВЛ 20 кВ и ниже, передающие энергию к потребителям.
-
Сверхдальние ВЛ
-
По напряжению
- Воздушные Линии до 1к В (ВЛ низкого класса напряжений)
- Воздушные Линии больше 1 кВ
- Воздушные Линии 1–35 кВ (ВЛ среднего класса напряжений)
- Воздушные Линии 110–220 кВ (ВЛ высокого класса напряжений)
- Воздушные Линии 330–750 кВ (ВЛ сверхвысокого класса напряжений)
-
Воздушные Линии больше 750 кВ (ВЛ ультравысокого класса напряжений)
-
По режиму работы нейтралей
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
т.е. нейтраль не присоединена к устройству заземленному или присоединена через прибор с высоким сопротивлением к нему. У нас такой режим нейтрали применяется в электросетях напряжением 3—35 кВ с низкими токами однофазных заземлений. - Трёхфазные сети с резонансно-заземлёнными (компенсированными) нейтральная шина соединена с заземлением через индуктивность. Обычно используется в сетях с высокими токами однофазных заземлений напряжением 3–35 кВ
- Трёхфазные сети с эффективно-заземлёнными нейтралями это сети высокого и сверхвысокого напряжения, нейтрали которых заземлены через маленькое активное сопротивление или напрямую. В таких сетях применяются трансформаторы напряжением 110 или 150 и иногда 220 кВ,
- Сети с глухозаземлённой нейтралью это когда нейтраль трансформатора или генератора заземляется через малое сопротивление или напрямую. Эти сети имеют напряжение менее 1 кВ, или сети 220 кВ и больше.
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
-
По режиму работы в зависимости от состояния сети
- Воздушные Линии нормального режима работы (опоры целы провода, троса не оборваны)
- Воздушные Линии аварийного режима работы (при разрыве проводов и тросов)
- Воздушные Линии монтажного режима работы (во время монтажа или демонтажа опор, проводов и тросов)
Кабельная линия электропередачи (КЛ) — это линия которая служит для транспортировки электроэнергии, в неё входит один или несколько кабелей (проложенных параллельно) которые соединяются соединительными муфтами и заканчиваются при помощи стопорных и концевых муфт (заделками) и деталей для крепления, а для линий использующие масло, кроме того, с подпитывающими приборами и датчиком давления масла.
Кабельные лини можно разделить на 3 класса в зависимости от прокладки кабеля:
- воздушные,
- подземные
- подводные.
кабельные линии протянутые воздушным способом это линии в которых кабель цепляют стальным тросом на опорах, стойках, кронштейнах.
Подземные кабельные линии — кабель прокладываемый в кабельных траншее, тоннелях, коллекторах.
Подводные кабельные линии это линии в которых кабель проходит через водную преграду по её дну.[ Источник]
Тематики
Синонимы
EN
- electric line
- electric power line
- electric power transmission line
- power line
- power transmission line
- transmission line
DE
FR
2 линия электропередачи; ЛЭП
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
601-03-03*
de Leitung
en electric line
fr ligne electrique
Источник: ГОСТ 24291-90: Электрическая часть электростанции и электрической сети. Термины и определения оригинал документа
Русско-французский словарь нормативно-технической терминологии > линия электропередачи
10 поверхность
surface
-, аэродинамическая (профиль) — airfoil
-, аэродинамическая компенсированная (уравновешенная) — aerodynamically balanced surface
- без покрытия — bare surface
нанести тонкий слой масла на стальную поверхность, не имеющую (защитного) покрытия. — apply а light coat of oil to any bare steel surfaces
-, блестящая (после зачистки) — luster surface
зачистить лакокрасочное покрытие до появления металпического блеска. — clean off paint coating until luster surface appears.
- бонки, опорная (под болт) — bolt boss abutment face
-, влажная (впп) — (runway) wet surface
- водная (моря) — water surface
water-surface condition scale.
-, вспомогательная несущая — auxiliary lifting surface
-, гладкая — smooth surface
-, граничная — boundary surface
-, земная — surface of the earth
- зуба замка лопатки, силовая — blade serration load face
-, компенсированная (руля или элерона) — balanced control surface
- крыла — wing surface
- крыла, верхняя — upper wing surface
- крыла, нижняя — lower wing surface
-, мирового океана в состоянии равновесия воды, уровенная — sea-level gravity equipotential
-, не имеющая металлического блеска — lusterless surface
-, нерабочая — nоn-working surface
-, несущая — lifting surface
часть летательного аппарата, предназначенная для создания аэродинамической (в частности, подъемной) силы при движении аппарата в воздухе. — an airfoil that provides an outer contour or plane to perform a function as in "lifting surface" or "control surfасе".
- обода колеса для монтажа шины — tire bed seat
-, окружающая — surrounding surface
зачищать края забоины с плавным переходом на окружающую поверхность, — smoothly blend the edges of а damage (nick) into the surrounding surface.
-, опорная (монтажная) — bearing surface
-, ответная — mating face
- перехода (см. переход) — fillet surface
-, посадочная (для сопряжения деталей, узлов) — mounting face, fit
-, посадочная (напр., воздушнаго стартера, насоса) — (air starter, pump) mounting face
the fuel pump mounting face is on the accessory drive gear box.
-, посадочная (стык) — joint face
поверхность разъема между двумя частями (половинами) узла. — joint face is parting surfaces between two halves of assembly.
-, привалочная (детали) — mounting face
-, притертая (прикатанная, пришлифованная) — surface of contact
-, рабочая — working surface
-, рулевая — control surface
подвижные несущие поверхности, предназначенные дпя управления самолетом: руль высоты, элероны, руль направления, триммеры, сервокомпенсаторы. — the airfoil shaped surfaces which control the flight attitudes of an aircraft, i.e., the elevators, ailerons, rudder, and auxiliary controls such as tabs.
- с аэродинамической компенсацией, рулевая (управления) — aerodynamically balanced control surface
поверхность управления, часть которой вынесена по всей длине вперед (по полету) от оси вращения (подвески). компенсация служит для уменьшения усилий летчика, потребных для отклонения поверхности управления в полете (рис. 18). — а control surface is balanced aerodynamically when а рогtion of the surface is ahead of the hinge line. control surfaces are balanced aerodynamically to make them more easify manipulated by the pilot and assist in avoiding flutter conditions.
- с весовой компенсацией, рулевая (управления) — statically /mass/ balanced control surface
поверхность управления с центром массы, совмещенным с осью вращения, часто обеспечиваемым установкой грузов-балансиров в носовой части профиля. препятствует возникновению флаттера поверхности (рис. 18). — а control surface is statically balanced when it is mass balanced about the hinge line, i.e., it is hinged at its center of gravity or, as is more often the case, when а weight is fastened to the surface and counter balances the weight of the control surface, to prevent flutter of the surface.
-, скользкая (впп, рулежной дорожки) — slick /slippery/ surface. on slick surfaces (slick runway or taxiway) the optimum applied brake pressure is appreciably reduced.
- с роговой компенсацией, рулевая (рис. 18) — horn-balanced control surface
- соприкосновения — contact surface
-, трущаяся — surface subject to friction
- управления — control surface
подвижная (управляемая) аэродинамически профилированная поверхность, служащая для управления поломением самолета в пространстве (относительно трех осей). к основным поверхностям управления относятся: рули высоты и направления, элероны. — control surface is a device movable in flight, primary function of which is to govern motion of the aircraft in pitch, roll or yaw. control surfaces include: ailerons, elevator and rudder.
- управления с аэродинамической компенсацией — aerodynamically-balanced control surface
- управления с весовой компенсацией — statically /mass/ balanced control surface
- управления с роговой компенсацией — horn-balanced control surface
-, фрикционная (тормозного диска) — friction face the three rotor discs afford six friction faces.
- шины, монтажная (на ободе) — tire bed seat
- шланга (герметизации), уплотняющая — sealing strip nib
балансировать п. управления — balance the control surface
нивелировать п. управления — adjust the control surface
отклонять п. управления — deflect the control surface
подвешивать п. управления — hinge the control surfaceРусско-английский сборник авиационно-технических терминов > поверхность
11 jacket
прозрачный конверт ( для удостоверений ИТЛ), ( для МФ) джекет, кляссер ( для вкладок)джеккет (форматный прозрачный плоский репрографический носитель изображения с одним или несколькими каналами для монтажа микрофильмов в отрезке)Англо-русский словарь промышленной и научной лексики > jacket
12 вытяжная заклепка
вытяжная заклепка
-
[Интент]
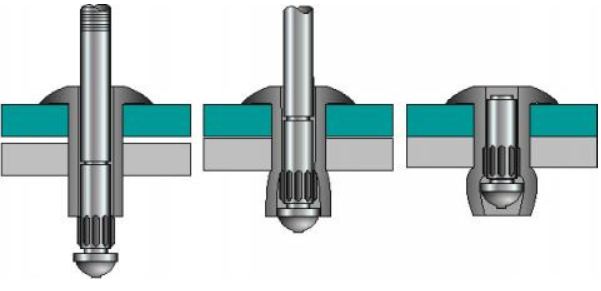
Заклепки вытяжные алюминиевые
Вытяжные заклепки относятся к разряду вспомогательных элементов, которые способны скреплять между собой несколько деталей. Данные заклепки характеризуются тем, что при их установке не требуется доступ с обеих сторон. Это значит, что они облегчат дополнительное соединение уже зафиксированного предмета. Заклепки незаменимы для крепления металлов, которые не подлежат сварке. Они способны уберечь металл от преждевременного повреждения и деформации. Вытяжные заклепки широко применяются в масштабном строительстве, в ремонте и конструкции машин, в электронике и многих других отраслях.
Помимо вытяжных заклепок, бывают комбинированные, резьбовые, полукруглые, потайные, подстроенные под установку при помощи молотка. В качестве материала для заклепок используется медь, сталь, алюминий, нержавейка.
Заклепки вытяжные алюминиевые выполнены из стали, однако соединяющим материалом служит алюминий. Вытяжная заклепка работает по принципу крепления двух элементов: заклепки из стального материала и алюминия. Обе заклепки выполняют неразъемное соединение конструкций из твердых материалов и тонких листов металла.
Изделие представляет собой тандем гильзы и стержня. Монтаж заклепок, независимо от материала их изготовления, осуществляется с использованием одной стороны. Заклепку необходимо лишь вставить в приготовленное отверстие и вытянуть стержень при помощи заклепочника. Таким образом, получается прочное прилегание деталей.
Вытяжные заклепки принято различать по типу бортика:
- заклепка со стандартным бортом является универсальной. Область ее применения довольно широкая;
- с потайным бортиком заклепка используется в том случае, когда головка не должна быть видна на поверхности основания после монтажа. Наносится на гладкую поверхность;
- заклепка с широким бортиком. За счет своих увеличенных параметров, бортик снизит давление на основание. Такие заклепки получили свое широкое использование в креплении изделий из деликатного материала.
[ Источник]
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > вытяжная заклепка
См. также в других словарях:
ГОСТ Р 53635-2009: Газовые воздухонагреватели с принудительной конвекцией для отопления (обогрева) помещений теплопроизводительностью до 100 кВт. Общие технические требования и методы испытаний — Терминология ГОСТ Р 53635 2009: Газовые воздухонагреватели с принудительной конвекцией для отопления (обогрева) помещений теплопроизводительностью до 100 кВт. Общие технические требования и методы испытаний оригинал документа: 3.2.2… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50542-93: Изделия из черных металлов для верхнего строения рельсовых путей. Термины и определения — Терминология ГОСТ Р 50542 93: Изделия из черных металлов для верхнего строения рельсовых путей. Термины и определения оригинал документа: 36 биметаллический рельс (Ндп. двухслойный рельс): Обычный рельс, у которого головка или верхняя ее часть… … Словарь-справочник терминов нормативно-технической документации
Blue-key — Синяя копия (служит для монтажа); Синяя копия … Краткий толковый словарь по полиграфии
Blue-key — Синяя копия (служит для монтажа); Синяя копия … Краткий толковый словарь по полиграфии
Нефтяная вышка — (Oil derrick) Устройство, предназначение и использование нефтяных вышек Информация об устройстве, назначении, описании и использовании нефтяных вышек Содержание — это разрушения с помощью специальной техники. Различают два вида бурения:… … Энциклопедия инвестора
ГОСТ 13699-91: Запись и воспроизведение информации. Термины и определения — Терминология ГОСТ 13699 91: Запись и воспроизведение информации. Термины и определения оригинал документа: 241 (воспроизводящая) игла: Игла, следующая по канавке записи механической сигналограммы с целью воспроизведения информации Определения… … Словарь-справочник терминов нормативно-технической документации
РМ 4-239-91: Системы автоматизации. Словарь-справочник по терминам. Пособие к СНиП 3.05.07-85 — Терминология РМ 4 239 91: Системы автоматизации. Словарь справочник по терминам. Пособие к СНиП 3.05.07 85: 4.2. АВТОМАТИЗАЦИЯ 1. Внедрение автоматических средств для реализации процессов СТИСО 2382/1 Определения термина из разных документов:… … Словарь-справочник терминов нормативно-технической документации
Дизайн-проект — Дизайн проект это комплект документов и материалов определённого свойства, а именно, характеризующих все отделочные решения по дизайну офиса, дома, квартиры или отдельной комнаты. Прописывается всё, начиная с плана возведения новых… … Википедия
Киносъёмочный аппарат — (кинокамера) устройство, предназначенное для записи движущегося изображения на киноплёнку. Процесс записи называется киносъёмкой, а полученное в результате изображение используется для создания кинофильма. В процессе киносъёмки при помощи… … Википедия
Пластиковая карта — Банковские платёжные карточки Пластиковая карта пластина стандартных размеров (54x86x0,76мм), изготовленная из специальной, устойчивой к механическим и термическим воздействиям … Википедия
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский